Research Projects
Multi-Rod Planetary Regolith Drilling Robot
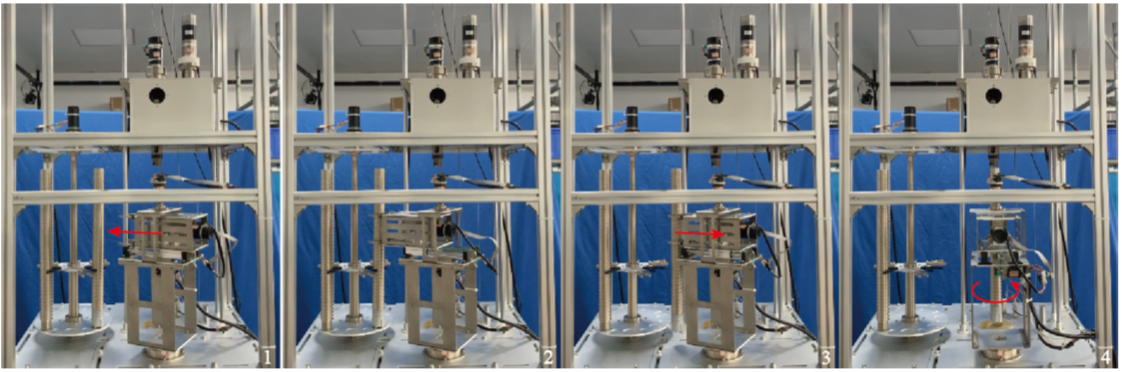
Silhouette of the multi-rod cyclic operation sequence on the prototype
A deep-regolith sampling system for lunar exploration. Independently completed full-stack R&D across control system design, motion planning, soil-tool interaction modeling, and deep learning.
- Role — Project Lead · Master’s Thesis · NSFC Project
- Lab — GDUT Biomimetic & Intelligent Robotics Lab
- Timeline — 2023.06 – Present
Key contributions
- Control System — Built a 9-DOF drilling robot platform with EtherCAT + Modbus dual-bus architecture; HMI features 5-thread parallelism, 7-state FSM, and safety interlocks.
- Motion Planning — Modeled multi-rod cooperative sequencing as an RCPSP problem; solved via Petri net + MILP + CP-SAT for globally optimal rod scheduling (≥4.9% improvement).
- Mechanics Modeling — Proposed a multi-component coupled soil-tool interaction model (Janssen + Terzaghi + PFRT + Coulomb); experimentally validated with ±18% prediction error.
- Deep Learning — Built a physics-guided classification model with physical-prior force-ratio features; achieved cross-domain transfer F1 = 0.736 (+16.7 pp over baseline).
- Virtual Prototype — Built a Unity-based integrated simulator of the 9-DOF robot; mapped the Petri-net / RCPSP scheduler to scripted task sequences for risk-free algorithm validation and operator training.
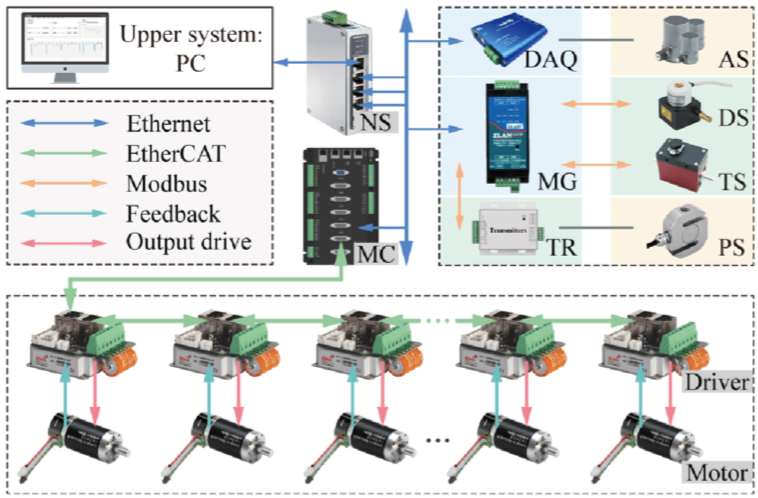
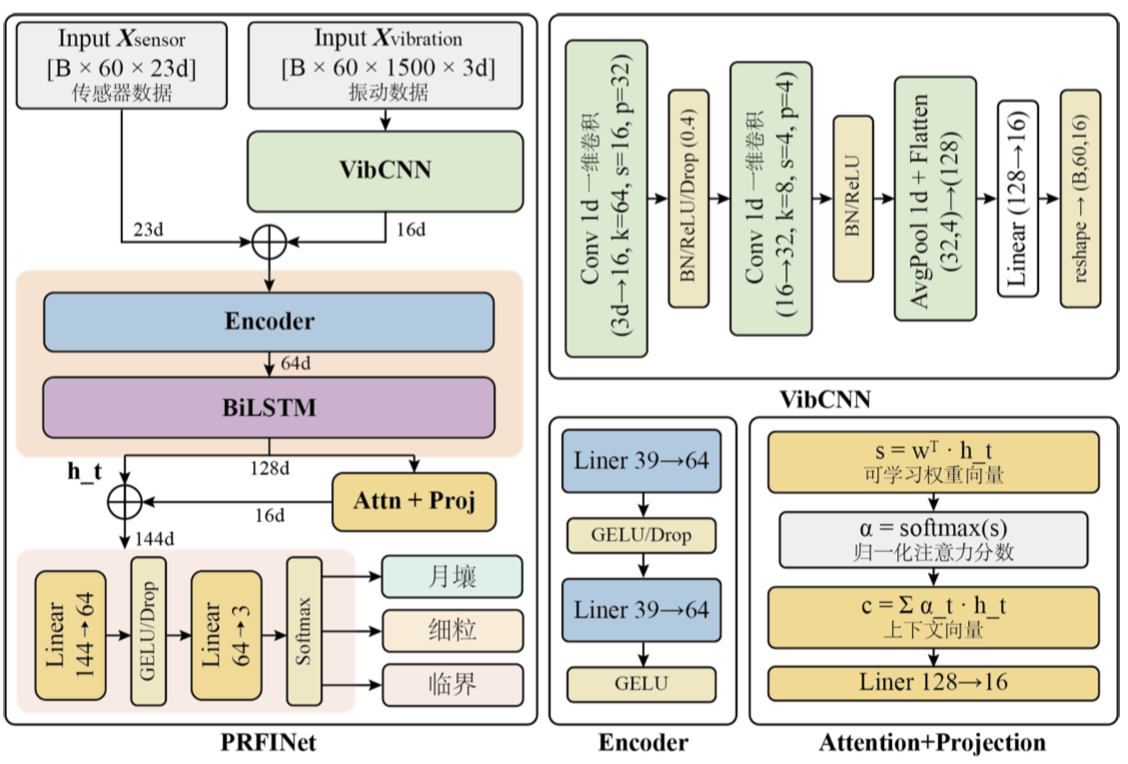
Left: Dual-bus control system architecture · Right: PRFINet deep learning model
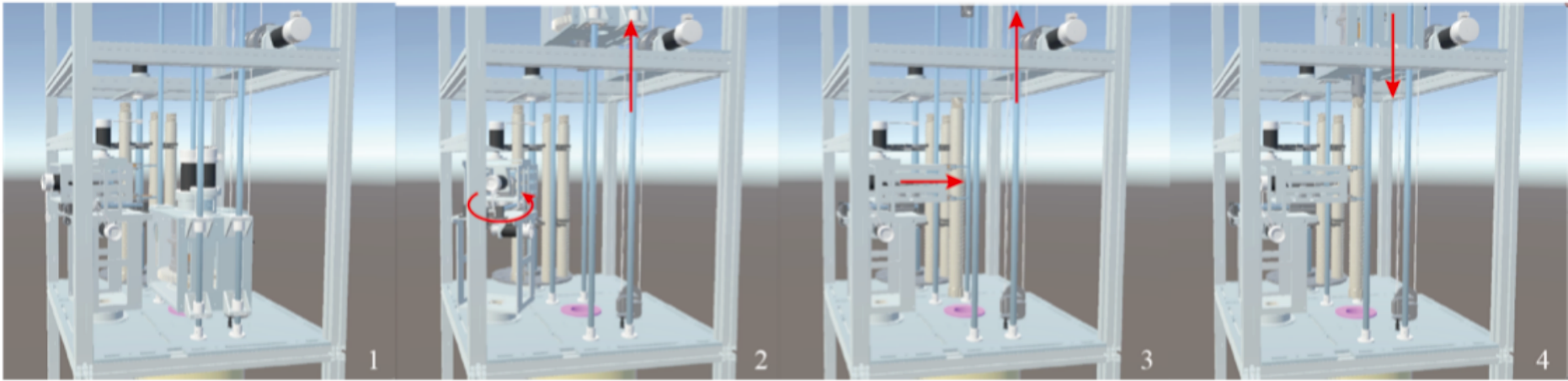
Unity virtual prototype executing concurrent drilling and rod-preparation in simulation
Tech stack — EtherCAT Modbus Qt / C++ PyTorch OR-Tools Petri Net SQLite Optuna Unity C#
Output — 1 physical prototype, 1 Unity virtual prototype, 2 invention patents (1 granted), 1 software copyright, 1 EI conference paper, 2 SCI journal papers.
Vacuum-Cryogenic Drill Temperature Monitoring System

Instrumented ice-drill prototype with thermocouple wiring


Left: Thermocouple embedding on spiral drill bit · Right: Multi-channel temperature scanner board
Commissioned by Beijing Institute of Satellite Manufacturing (Factory 529). Delivered a full temperature monitoring solution for lunar water-ice drilling at −190 °C under vacuum — covering system design, hardware/software development, and mechanical integration.
- Role — System Architect & Project Lead
- Client — Beijing Institute of Satellite Manufacturing (Factory 529)
- Timeline — 2025.07 – Present
Key contributions
- System Design — Designed a 10-channel micro-thermocouple embedding scheme with slip-ring routing and anti-wear protection for reliable signal acquisition under extreme conditions.
- Hardware — Designed a multi-channel temperature scanner based on STM32G030 + ZAM6218, with Modbus / RS-485 uplink.
- Software — Developed a cross-platform acquisition application supporting 100 Hz sampling, 5M+ data points, multi-point calibration, and CSV import/export.
- Thermal Analysis — Built a thermal-resistance / thermal-capacitance equivalent model; performed coupled thermal-structural verification with SolidWorks Simulation.
Tech stack — STM32 ZAM6218 Modbus RTU RS-485 Tauri Web Serial API Thermal Modeling
Output — 1 instrumented ice-drill prototype, 1 monitoring system, 1 software copyright, 1 invention patent.
Compact EtherCAT Servo Drive
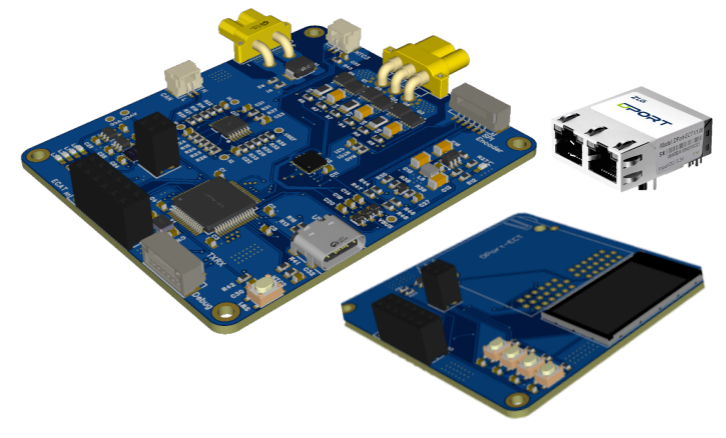

Left: PCB layout with three-phase inverter · Right: Assembled unit with EtherCAT module
A compact, high-performance servo drive for brushless motors, designed to serve as the actuator controller in the multi-rod drilling robot system. Implements field-oriented control (FOC) with EtherCAT real-time communication for multi-axis coordination.
- Role — Hardware & Firmware Developer
- Timeline — 2024.09 – Present
- Platform — STM32, three-phase MOSFET inverter, magnetic encoder (SPI), EtherCAT slave module
Key contributions
- Hardware — Designed a compact 4-layer PCB integrating three-phase inverter, current sampling, magnetic encoder interface, EtherCAT communication module, and OLED display.
- FOC Algorithm — Implemented field-oriented control with Park/Clarke transforms, PI current loop at 20 kHz PWM, supporting torque / velocity / position cascade control modes.
- EtherCAT Integration — Achieved deterministic real-time communication via SPI-based EtherCAT slave, enabling synchronized multi-axis motion in the drilling robot.
- Calibration & Diagnostics — Built motor parameter auto-identification, encoder calibration routines, and a command-line shell for real-time debugging.
Tech stack — STM32 FOC EtherCAT FreeRTOS SPI CAN PCB Design
Output — 1 functional drive board, integrated into the drilling robot control system.
Portable Folding Hand-Held Drill for Astronaut Use

A foldable hand-held drill stand for astronaut coring operations, featuring automatic feed, compact triple-fold frame, and extreme-environment tolerance.
- Role — Mechanical Design & Drive System Selection
- Client — Beijing Institute of Satellite Manufacturing (Factory 529)
- Timeline — 2025.03 – 2025.06
- Key work — Rope-drive auto-feed module, triple-fold frame, motor/drive selection (Maxon + Elmo), simulation-based strength & stiffness verification
- Output — 1 engineering prototype, validated by ground tests
Internship Experience
Beijing Institute of Satellite Manufacturing (Factory 529)
Engineering Systems R&D Intern · 2025.06 – 2025.09
- Hardware & software development of temperature monitoring for drill tools under vacuum-cryogenic conditions
- Independent thermocouple integration design and vacuum chamber test setup
- Multi-channel real-time data acquisition software development
- 3D modeling, test coordination, and technical documentation
Guangzhou Quality Supervision & Testing Institute
Quality Inspection Intern · 2023.08 – 2023.09
- Optical thickness measurement of insulation and sheath materials for cable products
- Tensile, crack-resistance, thermal-aging, and ductility tests per national standards
- Resistance measurement and co-authoring inspection reports